協働ロボットの“安全”を見える化する-CoboSafeシリーズ

![]()
「人とロボットが、安心して働ける現場へ」
ドイツのGTE Industrieelektronik GmbHのCoboSafe は、ヒトとロボットの協働作業における、衝突・挟み込みなどの力(Force)を検証する測定システムです。モジュール設計により、用途に応じた構成が可能。測定対象の作業・部位・ロボットに応じて最適セットを構築できます。この製品はISO/TS 15066およびTS B 0033規格に準拠しており、産業用協働ロボットの駆動アーム部の衝撃力を測定するためのハンドヘルド型測定器です。
協働ロボットを導入・運用する際人的安全が最重要事項で、リスクアセスメント(危険性評価)が義務・準備事項になっています。例えば、協働ロボットとの衝突・ハンドでの挟み込みの力を数値で把握することにより、実際の運用現場で「この作業でどれだけの衝撃があるか/圧力がかかるか」を明確にできるので、導入・維持管理の根拠をしっかりと示すことができます。安全性を可視化することにより、ヒト・ロボット協働ラインの信頼性を高めることができます。
主なラインアップは3種類
• CBSF-Basic:75N/mmのバネ内蔵で頭部を除く身体部位の衝撃力測定が可能。グラフと数値を表示。
• CBSF-XS:グリッパーの過渡的および準静的接触の衝撃力を測定。側面LEDで動作状態確認可能。
• CBSF:10〜150N/mmの9種類のフォースゲージを単体で組み込んだ製品。身体部位ごとに規定されたバネ内蔵の測定器。
また圧力測定用オプションとして「CoboSafe-Scan」圧力測定システムと、専用解析ソフト「CoboSafe-Vision」が利用可能です。これにより衝撃力の時間推移や圧力分布の詳細解析が行えます。 これらの製品は協働ロボットによる作業の安全性確保に不可欠で、産業ロボットメーカーや自動車機械部品メーカー、システムインテグレーター向けに提供されています。
ISO/TS 15066について
ISO/TS 15066では準静的接触と過渡的接触の力と圧力の許容値が定められています。準静的接触はゆっくり持続的に押された力と圧力(変形・押圧力)を意味し、過渡的接触は瞬間的な一瞬での衝突で発生する力と圧力(衝撃力・慣性力)を意味します。接触する人間の部位により許容値が異なります。リスクマネージメントの観点から協働ロボットが与える影響をそれぞれ数値化する必要があります。
|
身体部位 |
準静的接触:許容力[N] |
準静的接触:許容圧力[N/cm²] |
過渡的接触:許容力[N] |
過渡的接触:許容圧力[N/cm²] |
|
頭部(前部・側部) |
65 |
90 |
190 |
230 |
|
額 |
65 |
90 |
190 |
230 |
|
背面(肩甲骨含む) |
210 |
160 |
360 |
310 |
|
胸部(前面) |
140 |
90 |
230 |
130 |
|
腹部 |
100 |
120 |
170 |
210 |
|
上腕 |
150 |
170 |
220 |
280 |
|
前腕 |
150 |
190 |
250 |
310 |
|
手(手のひら) |
140 |
240 |
280 |
450 |
|
手(甲側) |
120 |
180 |
210 |
300 |
|
指 |
140 |
140 |
190 |
190 |
|
大腿部 |
220 |
190 |
300 |
280 |
|
下腿(すね) |
170 |
160 |
240 |
230 |
|
足(甲) |
160 |
190 |
240 |
270 |
|
足(つま先) |
130 |
180 |
200 |
260 |
用途
CBSFは、囲いなどの保護装置がない協働ロボットアプリケーションでも安全に作業できることを証明するために用いられます。製造業や物流など、人とロボットが近接して働く場面でのリスク評価に欠かせないツールです。
活用シーン
・協働ロボットの導入時や定期安全チェックの際に、実際の運用条件下で衝突時の力・圧力が規格値内かどうかを検証。
・研究機関やシステムインテグレータが複数のフォースゲージを組み合わせて最適な計測セットを構成し、複数の応用事例に対応
アクセサリー
測定時に人体の生体応答を模擬する「K1」ダンピングエレメントなどのオプション部品が用意されており、ISO/TS 15066などの規格に基づいた安全検証に役立ちます。
製品紹介
人とロボットが同じ作業空間で協働する現場において、保護柵などの隔離型安全装置が設置されていない場合、人とロボットの接触や衝突を完全に排除することはできません。
そのため、適用される規格で定められた力および圧力の許容閾値を遵守する必要があります。これらの閾値を守ることで、人と協働ロボットの安全な運用環境が確保されます。労働安全の観点からは、協働ロボットの用途に応じて異なる安全要件が生じます。衝突の防止および検知、トルクの監視、力の制限などの機能は、物理的な安全柵と同等の保護レベルを実現する必要があります。
『FORCE MEASUREMENT DEVICES』
COBOSAFE CBSF
モジュラー構成のシステム構成で、用途に合わせてカスタマイズし、拡張できる製品となっています。10〜150N/mmの9種のの異なるばね定数を持つフォースセンサーを内蔵している製品です。
(CBSF-10 CBSF-20 CBSF-30 CBSF-35 CBSF-40 CBSF-50 CBSF-60 CBSF-75 CBSF-150)これらのばね定数(K2)と追加のダンピング要素(K1)を組み合わせることで、以下の規格群に基づく生体力学的特性を再現できます。
- EN ISO 10218-1 および EN ISO 10218-2
- EN ISO/TS 15066
- DGUV(ドイツ法定労働災害保険協会)
- 情報文書「FB HM-080」
- 米国国家規格協会(ANSI)傘下のロボット産業協会(RIA)による「RIA TR R15.806-2018」


CBSF-Basic
協働ロボットにおける過渡的および準静的な力・圧力を評価するためのハンディタイプ測定装置
CBSF-Basic は、CoboSafe-Scan 圧力測定セットと組み合わせて使用することで、簡易的な測定方法を実現する力測定装置です。本装置では、単一のばね定数をもつ測定ユニットを使用し、頭部を除く各身体部位における衝突時の力および圧力を測定します。シンプルな構成ながらも、幅広い用途で十分な測定精度を提供します。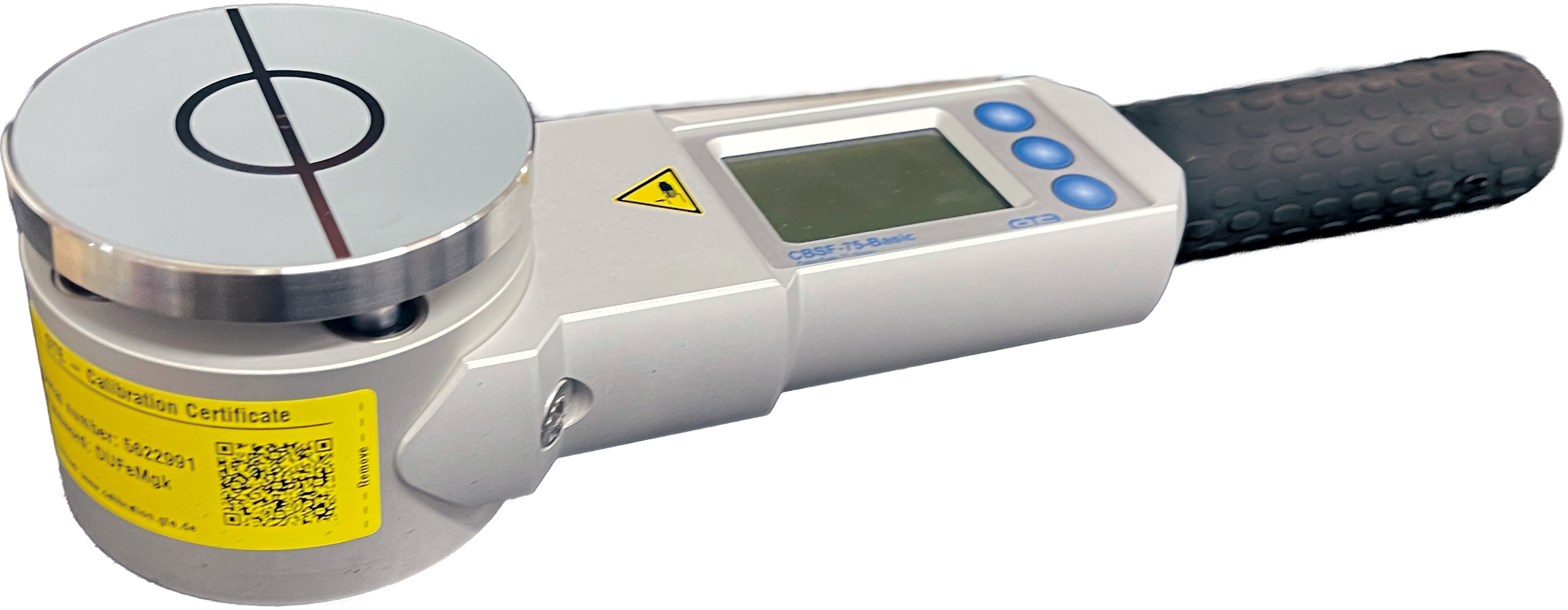
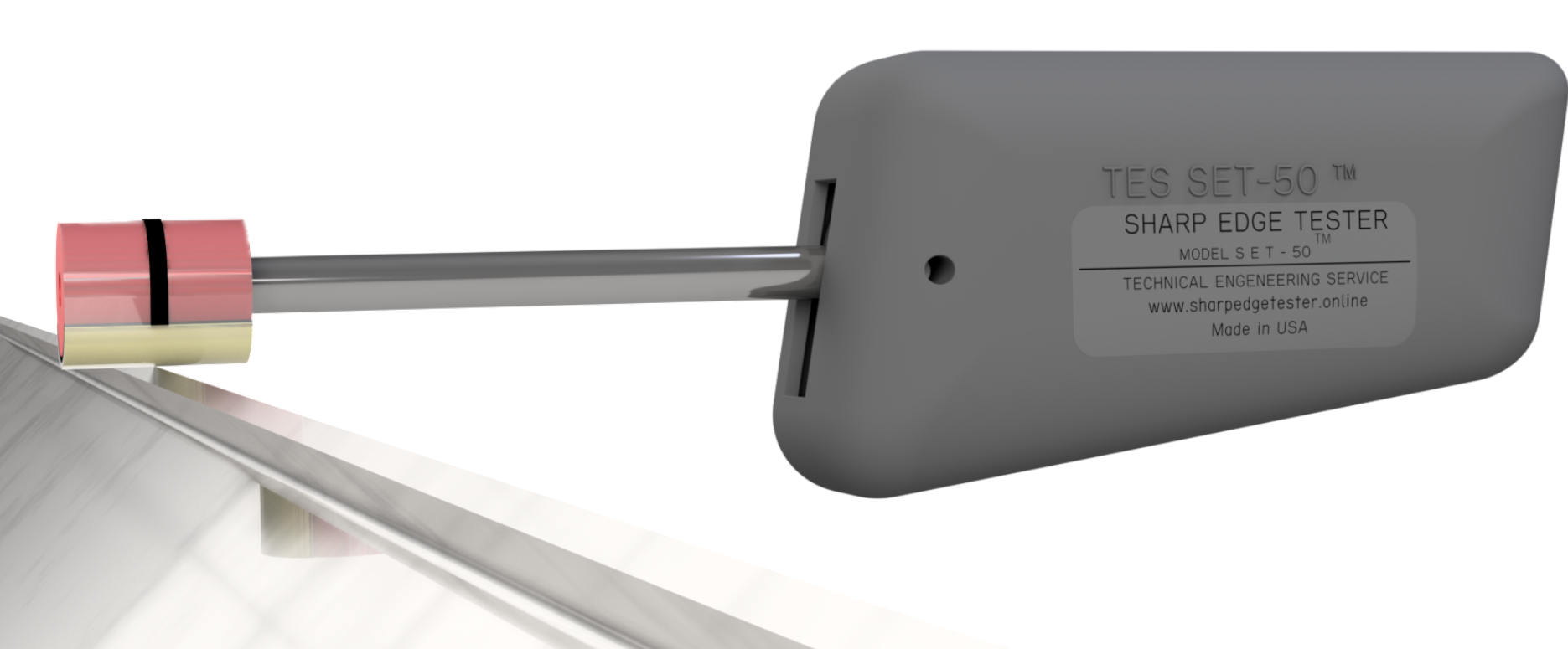
CBSF-XS
グリッパーおよび狭所での測定に対応した力測定装置。限られた隙間や狭い空間での測定が必要な場合に特化して設計されています。たとえば、人協働ロボット(HRC)におけるグリッパーの把持力測定などがその代表的な用途です。
この測定装置は非常にコンパクトな設計のため、狭い隙間にも容易に設置できます。本体にはリング状の光信号インジケータが搭載されており、測定装置の動作状態を視覚的に確認できるため、ディスプレイを直接監視する必要がありません。また、測定データは無線通信またはUSBケーブルのいずれでもPCへ転送でき、CoboSafe-Visionソフトウェアで確認・解析が可能です。これにより、装置の位置を再設定することなく、パラメータを変更して繰り返し測定を行うことができます。
『Pressure Measurement Sets」
COBOSAFE-SCAN(圧力感知フィルムとスキャナーのセット)
CoboSafe-Scan セットは、富士フイルム製「Prescale(プレスケール)」圧力測定フィルムをベースにした測定システムで、
圧力分布および最大圧力の記録・解析を可能にします。このフィルムは、圧力が加わると発色する特性を持ち、
その色の濃淡によって圧力の強さや分布を視覚的に表示します。つまり、発色の濃い部分ほど高い圧力が加わったことを示します。測定後は、専用に開発されたスキャナおよび校正シートを使用して、テストで得たフィルム上の圧力像をスキャンし、CoboSafe-Vision ソフトウェアにインポートして自動解析を行います。
この解析により、圧力の分布・ピーク値・接触面積などが定量的に評価されます。
|
フィルムタイプ |
測定圧力範囲(MPa) |
主な用途例 |
備考 |
|
プレスケールLLW(超低圧用) |
0.2 – 0.6 MPa |
軽い接触圧、HRC協働ロボットの皮膚接触部位、柔らかい素材の圧力評価 |
CoboSafe-Scan 標準セット採用 |
|
プレスケールLW(低圧用) |
0.5 – 2.5 MPa |
通常の接触圧、ロボットアームの押し当て力や安全評価 |
オプション |
CoboSafe-Tek(電子式圧力測定セット)
CoboSafe-Tek セットは、最大圧力・圧力分布・圧力曲線を、電子式フィルムセンサーによって高精度に測定するシステムです。
このシステムは、より詳細で高分解能な結果を必要とするアプリケーションに特に適しています。
衝突時の圧力は「ビデオ映像のように連続的に」記録され、力測定データ(フォースカーブ)と同期させることで、過渡的および静的圧力に対する圧力値および分布を可視化・解析することができます。これにより、協働ロボット安全試験に必要なすべての要件を完全に視覚化できます。
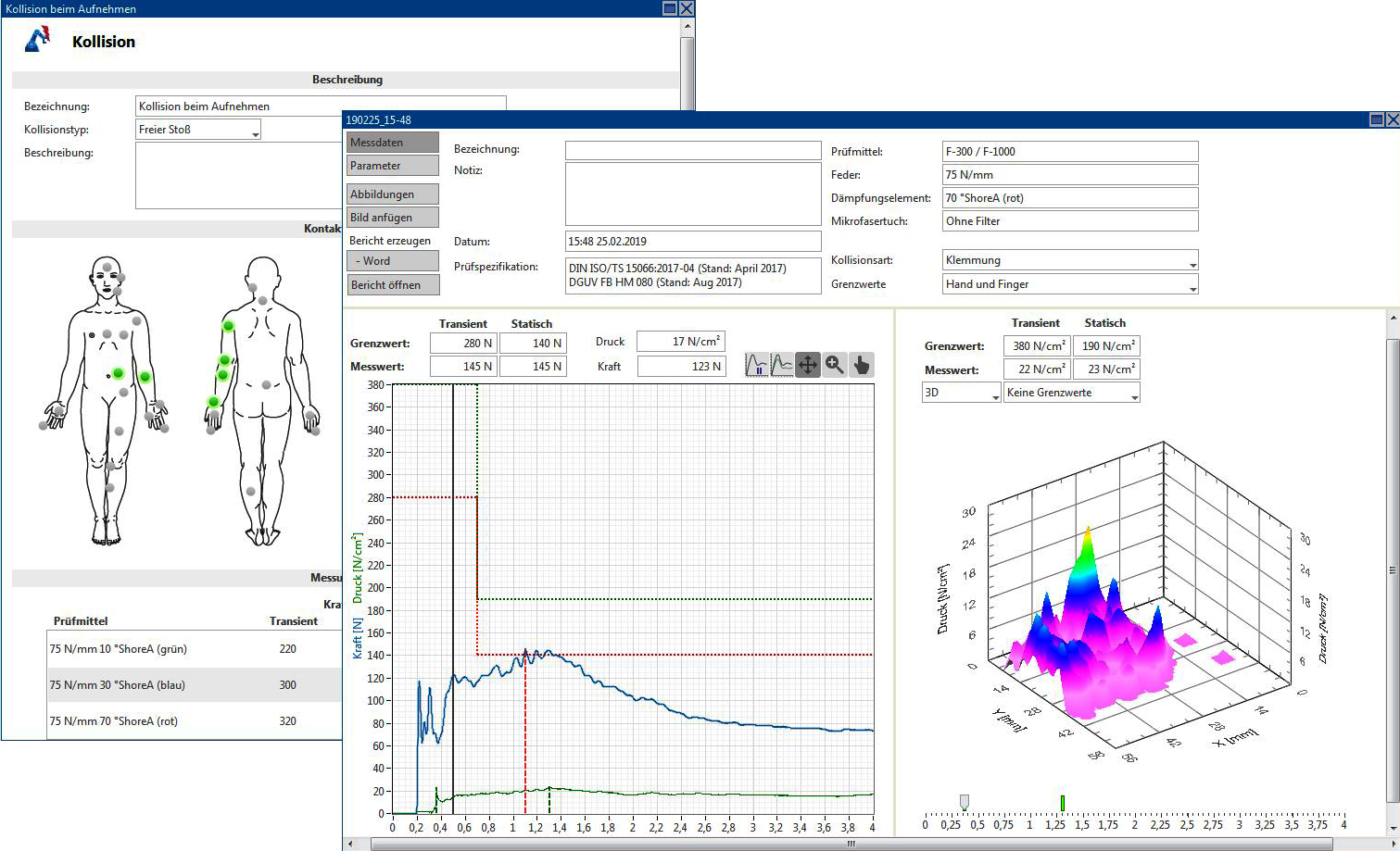
Evaluation Software
CoboSafe デバイスで取得した力・圧力測定の結果は、Windowsベースの評価ソフトウェア CoboSafe-Vision 上で容易に解析可能です。本ソフトウェアは、測定カーブのグラフ表示を含む詳細なレポートを自動生成します。
さらに、圧力画像については、
- 2次元および3次元表示
- フィルタ機能によるノイズ除去や特定領域の抽出
か可能です。また、各測定結果に対して個別のログ記録機能があり、
解析結果は CSVファイル形式で出力することもできます。
このCoboSafe-Visionは、HRC安全試験・研究開発・品質保証の現場で、
測定から報告書作成までを効率化する包括的な解析ソフトウェアとして設計されています。